
Studienbericht über die Auswirkungen des Exoskeletts auf die L4L5-Bandscheibe bei manuellen Handhabungsbewegungen – Muskuloskelettale Simulation
Rückenschmerzen, die oft als das „Leiden des Jahrhunderts“ bezeichnet werden, gewinnen in den Industrieländern zunehmend an Bedeutung. Nach Angaben des französischen Institut National de Recherche et de Sécurité (INRS), hatten, haben oder werden in Zukunft mehr als zwei von drei Beschäftigten in Frankreich Schmerzen im unteren Rücken haben. Kreuzschmerzen (Lumbalgie) scheinen eine Pathologie mit multifaktoriellem Ursprung zu sein, mit der mehrere Risikofaktoren verbunden sind, wie etwa manuelle Handhabung, Stürze, Zwangshaltungen, große körperliche Anstrengungen etc. Zahlreiche Faktoren sind im beruflichen Umfeld und dabei in vielen Branchen zu finden. Schmerzen im unteren Rückenbereich sind für 20 % der Arbeitsunfälle und 7 % der Berufskrankheiten verantwortlich und machen damit fast 11,5 Millionen der ausgefallenen Arbeitstage pro Jahr aus.
Um die Risiken von Rückenschmerzen am Arbeitsplatz zu begrenzen, führen einige Unternehmen ergonomische Studien durch, um die Arbeitsplätze bestmöglich zu gestalten. Wenn eine Anpassung des Arbeitsplatzes nicht möglich ist, können neue Lösungen wie z.B. Exoskelette in Betracht gezogen werden. Ziel dieser Studie ist es, den Einfluss des Japet-Exoskeletts auf die Bandscheibe L4L5 während häufiger Bewegungen bei der manuellen Handhabung von Lasten zu analysieren.
Verwendetes Modell
Diese muskuloskelettale Simulation wurde mit der Software AnyBody Modeling System durchgeführt, die auf einem Ganzkörpermodell basiert (Ganzkörper, AnyBody Managed Model Repository, AMMR). Dieses Modell ist in der Forschungswelt weit verbreitet, mehr als fünfzig wissenschaftliche Publikationen beziehen sich darauf (AnyBody Technology). Viele Forscher haben diese Software verwendet, um die Belastungen in den verschiedenen Gelenken und insbesondere in der Wirbelsäule (Zee, 2007) (Rajaee, 2005) (Rajaee, 2005) (Rasmussen, 2009) (Bassani, 2017) zu untersuchen, wobei sie sich auf die in-vivo-Messungen von Wilke et al. bezogen (Wilke, 2001).
In dieser Studie wird die Auswirkung des Japet-Exoskeletts auf die auf die L4L5-Bandscheiben ausgeübte Kraft in Abhängigkeit von verschiedenen Parametern untersucht: der Lage der Last, dem Gewicht der Last sowie der Position des Körpers beim Tragen der Last.
AnyBody Technology bietet seiner Community die WilkeSpinalDiscPressure-Bibliothek an. Diese besteht aus drei Dateien, die uns als Grundlage dienten: „Standing Lift Close“, „Standing Lift Flexed“ und „Standing Lift Stretched Arms“. Die durch das Exoskelett bereitgestellten Kräfte betragen 4 kg pro Aktuator (d.h. insgesamt 16 kg). Um eine Drehbewegung auszuführen, folgt das Becken- /Thoraxsegment einer B-Spline-Kurve, die eine Drehung des Rumpfes von 0° bis 25° erlaubt. Da die Bandscheibe durch einen Punkt im AnyBody-Modell repräsentiert wird, werden wir hier nicht über den intradiskalen Druck sprechen, sondern über die Kraft, die auf die Bandscheibe ausgeübt wird.
Auswirkung des Exoskeletts auf die Bandscheibe L4L5 entsprechend der Lokalisation der Last
Um die Auswirkungen des Exoskeletts auf die Bandscheibe in Abhängigkeit von der Lokalisation der Last zu beurteilen, trägt das Modell eine Last von 10 kg und befindet sich in einer orthostatischen Position. Es werden drei Tests durchgeführt: Nah am Körper getragene Last, mit halb ausgestreckten Armen getragene Last und mit ausgestreckten Armen getragene Last.
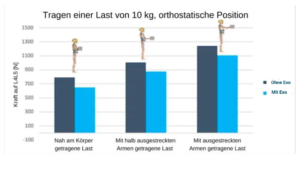
Abbildung 1: Auswirkung des Exoskeletts auf die Kraft, die auf die Bandscheibe L4L5 ausgeübt wird, in Abhängigkeit von der Lokalisation der 10kg-Last.
Wie von Wilke et al. vor einigen Jahren gezeigt wurde, nimmt die auf die L4L5-Bandscheibe ausgeübte Kraft mit zunehmendem Abstand der Last vom Körper zu. Es ist anzumerken, dass das Exoskelett es ermöglicht, die auf die L4L5-Bandscheibe ausgeübte Kraft um durchschnittlich 135 N (d. h. 13,8 kg) zu verringern, unabhängig von der Lokalisation der Last.
Auswirkung des Exoskeletts auf die Bandscheibe L4L5 unter Berücksichtigung des Gewichts der Last
Um die Auswirkung des Exoskeletts auf die Bandscheibe L4L5 in Abhängigkeit vom Gewicht der Last zu beurteilen, befindet sich das Modell in orthostatischer Position und trägt unterschiedliche Lasten mit halb ausgestreckten Armen. Das Gewicht der Lasten beträgt 0 kg, 5 kg, 10 kg, 15 kg und 20 kg.
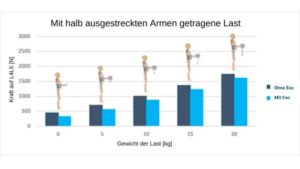
Abbildung 2: Auswirkung des Exoskeletts auf die Kraft, die auf die Bandscheibe L4L5 ausgeübt wird, in Abhängigkeit von dem Gewicht der getragenen Last.
Abbildung 2 zeigt, dass das Tragen des Japet-Exoskeletts während des Lastenhaltens eine Verringerung von durchschnittlich 135 N (oder 13,8 kg) auf die L4L5-Bandscheibe ermöglicht, unabhängig von dem Gewicht der Last.
Auswirkung des Exoskeletts auf die Bandscheibe L4L5 je nach Position des Operators beim Tragen der Last
Um die Auswirkung des Exoskeletts auf die Bandscheibe L4L5 in Abhängigkeit von der Position des Operators beim Tragen einer Last zu bewerten, trägt das Modell eine Last von 10 kg mit halb ausgestreckten Armen bei zwei Arten der Bewegung: axiale Rotation und Vorwärtsbeugung.
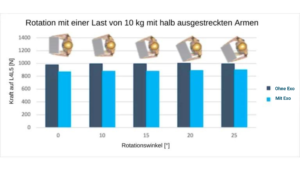
Abbildung 3: Auswirkung des Exoskeletts auf die Kraft, die auf die Bandscheibe L4L5 ausgeübt wird, beim Tragen einer 10 kg schweren Last während einer axialen Rotation.
Bei Rotationswinkeln von 0° bis 20° ermöglicht es das Exoskelett, die Kraft, die auf die L4L5 Bandscheibe wirkt, um durchschnittlich 113N zu reduzieren (Dekompression zwischen 11 % und 12 %). Bei einer 25°-Rotation verringert sich die Kraft um 92N, d.h. 9 % Dekompression.
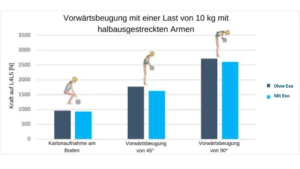
Abbildung 4: Auswirkung des Exoskeletts auf die Kraft, die auf die Bandscheibe L4L5 ausgeübt wird, beim Anheben einer 10 kg schweren Last vom Boden, bei 45° Vorwärtsbeugung und 90° Vorwärtsbeugung.
Das Japet-Exoskelett ermöglicht eine 4 %ige Dekompression der L4L5-Bandscheibe beim Aufnehmen der Last (10 kg) vom Boden sowie beim Tragen der Last in 90°-Vorwärtsbeugung. Bei einer Vorwärtsbeugung von 45° beträgt die Dekompression der Bandscheibe 8%.
Schlussfolgerung
Die Ergebnisse der Simulation zeigen, dass das Exoskelett es ermöglicht, die Kräfte auf die Bandscheibe L4L5 zu reduzieren, unabhängig von der Lage der Last, dessen Gewicht oder der Körperhaltung beim Tragen der Last. Das Exoskelett wirkt jedoch effektiver bei Rotationswinkeln zwischen 0° und 20° sowie bei einer Flexion von weniger als 45°.
Diese Ergebnisse können kritisiert werden, da es sich nicht um reale Bewegungen aus der Bewegungserfassung handelt, sondern um künstlich erzeugte Bewegungen. Die erzielten Ergebnisse sind jedoch ermutigend. Es wäre relevant, eine ähnliche Studie auf der Grundlage realer Aufnahmen in einer Arbeitssituation und in großem Maßstab durchzuführen.
Quellen
Bassani, T. (2017). Validation of the AnyBody full body musculoskeletal model in computing lumbar spine loads at L4L5 level.
INRS. (2018, 10 26). Récupéré sur INRS: http://www.inrs.fr/risques/lombalgies/statistique.html
Rajaee, M. A. (2005). Comparative evaluation of six quantitative lifting tools to estimate spine loads during static activities. Applied Ergonomics.
Rasmussen, J. (2009). Validation of a biomechanical model of the lumbar spine. 22nd Congress of the International Society of Biomechanics.
Wilke, H.-J. (2001). Intradiscal pressure together with anthropometric data – a data set for the validation of models. Clinical Biomechanics.
Zee, M. d. (2007). A generic detailed rigid-body lumbar spine model. Journal of biomechanics.